# Synthetic illustration; seed set so it is reproducible.
# Treat each morning as "on time" with the model's probability 0.81.
set.seed(35003)
p_on_time <- 0.81
n_mornings <- 10000
# rbinom draws 0/1 "on time" flags, one per simulated morning.
mornings <- rbinom(n = n_mornings, size = 1, prob = p_on_time)
# The running fraction on time should drift toward 0.81 as n grows.
running_fraction <- cumsum(mornings) / seq_len(n_mornings)
running_fraction[c(10, 100, 1000, 10000)] # snapshots at growing n
mean(mornings) # overall simulated P(on time) ~ 0.81Week 1 — Uncertainty, probability & models
What a probability statement means, and why we model uncertainty
The week question
When a transit app reports that the campus shuttle has an 81% chance of arriving on time, what does that number actually say? It looks like a fact about tomorrow morning, but tomorrow morning the shuttle will either be on time or it will not — there is no “81%” you can point to in the world once the morning happens. So the number must be describing something other than a single morning. This week we pin down what it describes, why two perfectly reasonable people can mean different things by it, and how we package that meaning into a small, explicit object called a probability model.
The thread we will pull all term starts here. Meet Maya, a commuter student who rides that shuttle to an early class. Her recurring question — “Will I make it on time?” — is the seed from which sample spaces, conditional probability, Bayes’ rule, random variables, and simulation will all grow in later weeks. This week we do not yet compute the 0.81; we learn to read it.
Why this matters
Probability is the language we use to reason carefully when we do not know what will happen. That covers an enormous amount of life and science: a weather forecast, a medical screening result, the reliability of a machine, the outcome of an election, the next value in a noisy measurement. In every one of these, someone has taken a vague feeling — “probably,” “unlikely,” “a good chance” — and replaced it with a number that obeys consistent rules. The payoff is that numbers can be combined, checked for contradictions, and updated when new information arrives; vague feelings cannot.
But a number is only as trustworthy as the model behind it. The same headline “81%” can rest on a long record of past mornings, on someone’s judgment, or on a chain of assumptions stitched together. If you do not know which, you cannot know how much to lean on it. Learning to ask “what model produced this number, and what did it assume?” is the single most transferable skill in this course. It is also what makes the later, more technical weeks feel like bookkeeping for a stance you already understand, rather than a pile of formulas.
Learning goals
By the end of this week you should be able to:
- Read a probability statement such as \(P(\text{on time}) = 0.81\) in two ways — as a long-run frequency and as a degree of belief — and say what each reading commits you to.
- Name the three ingredients of a probability model: a sample space, an assignment of probabilities, and the assumptions that justify the assignment.
- State the informal axioms every probability must satisfy (\(0 \le P \le 1\), the whole space has probability \(1\), disjoint events add, and the complement rule) and check a claimed number against them.
- Explain how a simulation turns the long-run-frequency picture into something literal you could watch on a screen, without yet writing or running the code.
- Identify the hidden choices — which event, which region, which time window — buried inside an everyday statement like “70% chance of rain.”
Core vocabulary
- Outcome \(\omega\) — one fully specified way the situation could turn out (e.g. “the shuttle is on time this morning”).
- Sample space \(\Omega\) — the set of all outcomes we are willing to consider. Choosing it is a modeling decision, not a fact handed to us.
- Event — a collection of outcomes we care about, written with a capital letter such as \(A\). “The shuttle is on time” is an event; so is its opposite.
- Probability \(P(A)\) — a number we attach to an event, meant to measure how strongly it is expected, subject to the rules below. We always write \(P(\cdot)\), never \(\Pr(\cdot)\).
- Complement \(A^{c}\) — the event that \(A\) does not happen. (“Not on time” is the complement of “on time.”)
- Disjoint (mutually exclusive) events — events that cannot both happen in the same outcome.
- Probability model — the package of sample space, probability assignment, and assumptions that together give every event of interest a number.
- Long-run frequency — the fraction of times an event happens if the situation were repeated many times under the same conditions.
- Degree of belief — a number expressing how confident a reasoner is in an event, given what they know.
All scenarios in these notes use synthetic data; seed 35003 is set wherever a simulation appears.
Concept development
Reading one number two ways
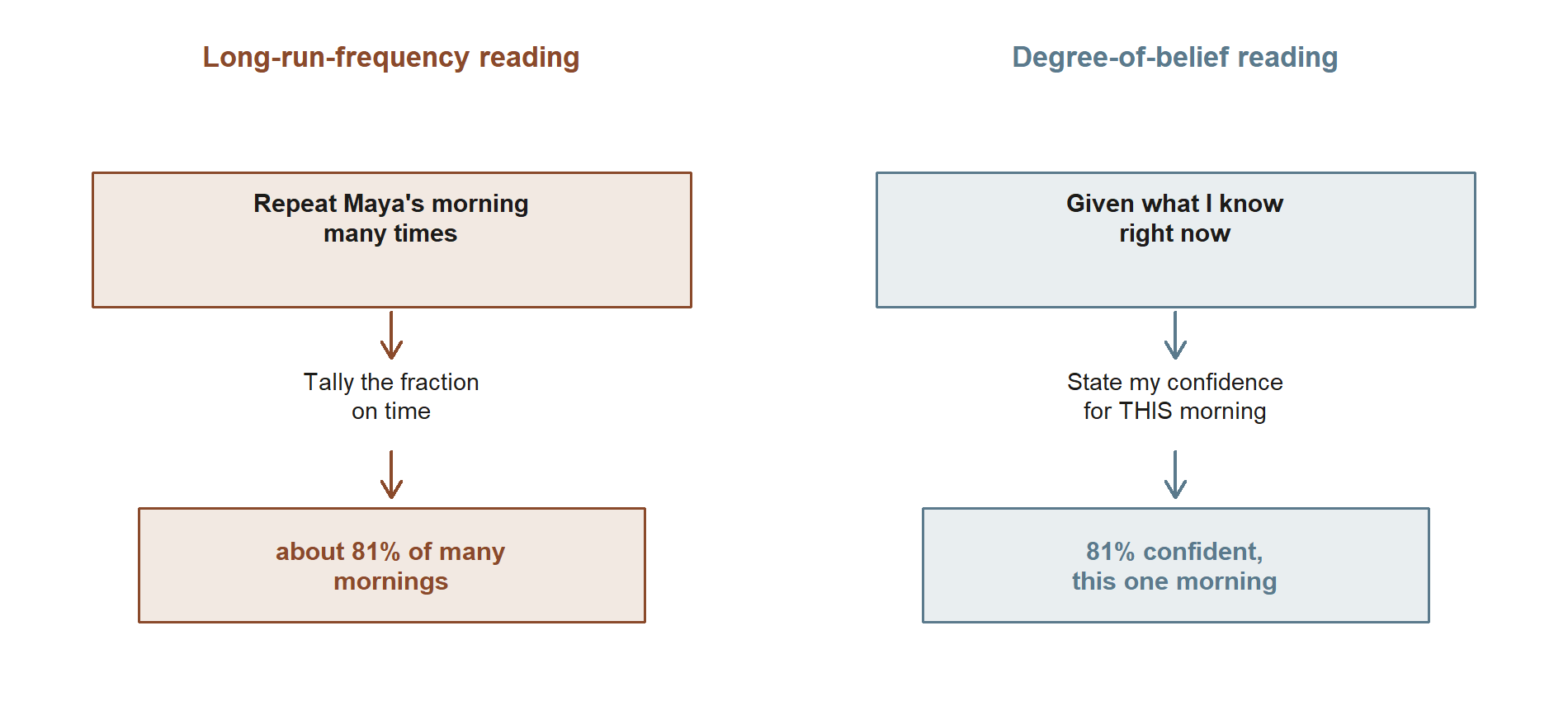
Take the headline \(P(\text{on time}) = 0.81\). There are two honest, time-tested ways to read it, and they answer different questions.
The long-run-frequency reading says: if Maya rode this shuttle on a large number of similar mornings, it would be on time about 81% of the time. On this reading, the 0.81 is a property of a repeatable process. It is checkable, at least in principle — keep a tally over a semester and compare. It is silent, though, about this particular morning, which is a single, non-repeatable event.
The degree-of-belief reading says: given everything I currently know — the season, the route, the weather report — I am 81% confident the shuttle will be on time tomorrow. On this reading, the 0.81 is a considered judgment that could legitimately differ between two people who know different things, and that should change when new information arrives. This is the reading that lets us talk sensibly about one-off events that will never be repeated.
These two readings are not enemies. Much of the time they agree, and a good frequency record is exactly the kind of evidence that should shape a reasonable degree of belief. The course is Bayesian-friendly: we will lean on the degree-of-belief reading when we get to updating with new information (the engine of weeks 3–5), while never abandoning the frequency picture that keeps our beliefs honest. Holding both in mind is a feature, not a confusion.
There is a third, deeper way to phrase the degree-of-belief stance, due to E. T. Jaynes: probability is extended logic — a consistent way to reason from incomplete information that reduces to ordinary true/false logic when you happen to be certain. We only name this idea here; we will not develop it. It is worth knowing that the rules we are about to write down can be motivated as “the unique consistent way to score plausibility,” not merely as “the math of coin flips.”
What a probability model is
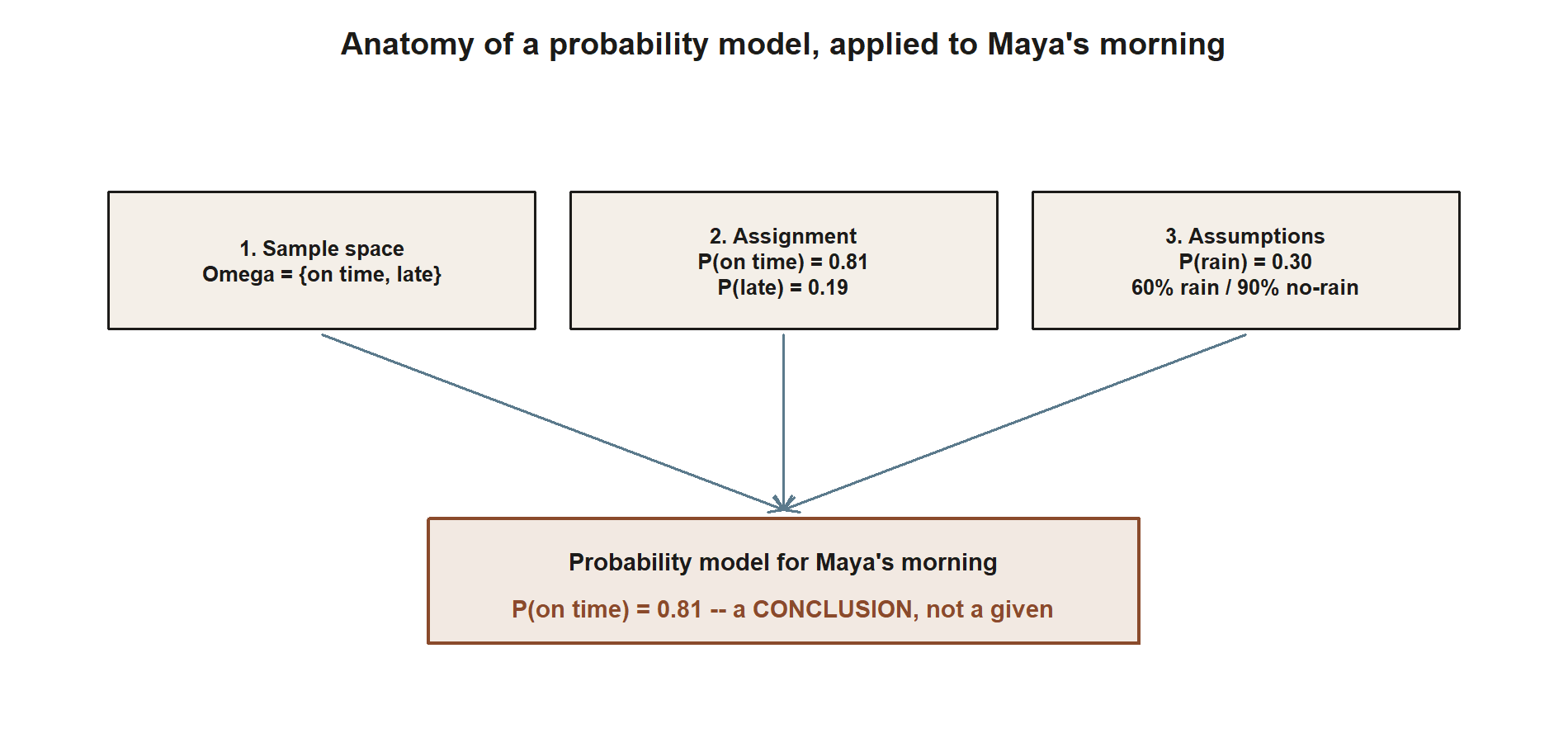
A single number floating free is not yet probability; it becomes probability only inside a model. A probability model has three parts, and naming them is the habit this whole course tries to build.
- A sample space \(\Omega\) — the menu of outcomes you have decided to consider. For Maya’s morning, the simplest menu is just \(\Omega = \{\text{on time}, \text{late}\}\). A richer menu might also track whether it rained, or how many minutes late. The menu is chosen; a different question deserves a different menu.
- An assignment of probabilities — a rule giving each event a number. For the simplest menu, \(P(\text{on time}) = 0.81\) and \(P(\text{late}) = 0.19\).
- The assumptions that justify the assignment — the often-invisible third part. Where did 0.81 come from? In our running world it is assembled: it rests on the assumptions that it rains about 30% of mornings, that the shuttle runs on time 60% of rainy mornings and 90% of dry ones, and that those two sub-models combine in a particular way. We will do that assembly carefully in weeks 2–3. For now the point is only that 0.81 is a conclusion, not a given — it inherits the trustworthiness of its assumptions.
Write a model down and a vague forecast becomes an auditable claim. You can ask whether the sample space left anything out, whether the numbers are internally consistent, and whether the assumptions are defensible. A number with no model behind it offers nowhere to put those questions.
The rules every probability obeys
Whatever reading you favor, the numbers have to play by a few rules, or they will contradict themselves. Here they are in plain form (we will treat them more formally in Week 2):
- Bounds. Every probability lives between 0 and 1: \[ 0 \le P(A) \le 1. \] Zero means “ruled out,” one means “certain,” and the in-between values are the interesting cases.
- Total. The whole sample space is certain to occur, so it carries all the probability: \[ P(\Omega) = 1. \]
- Addition for disjoint events. If \(A\) and \(B\) cannot happen together, the chance that one or the other happens is the sum: \[ P(A \cup B) = P(A) + P(B) \qquad \text{when } A \cap B = \varnothing. \]
- Complement. Because \(A\) and \(A^{c}\) are disjoint and together fill \(\Omega\), their probabilities must total one, which gives the most-used shortcut in the subject: \[ P(A^{c}) = 1 - P(A). \]
These four are not arbitrary bookkeeping; they are exactly what is needed for the numbers to never contradict each other. If someone tells you an event has probability \(1.3\), or that two opposite outcomes have probabilities summing to \(0.8\), you do not need to know anything about shuttles to know the model is broken. That self-checking power is the reason we insist on the rules from day one.
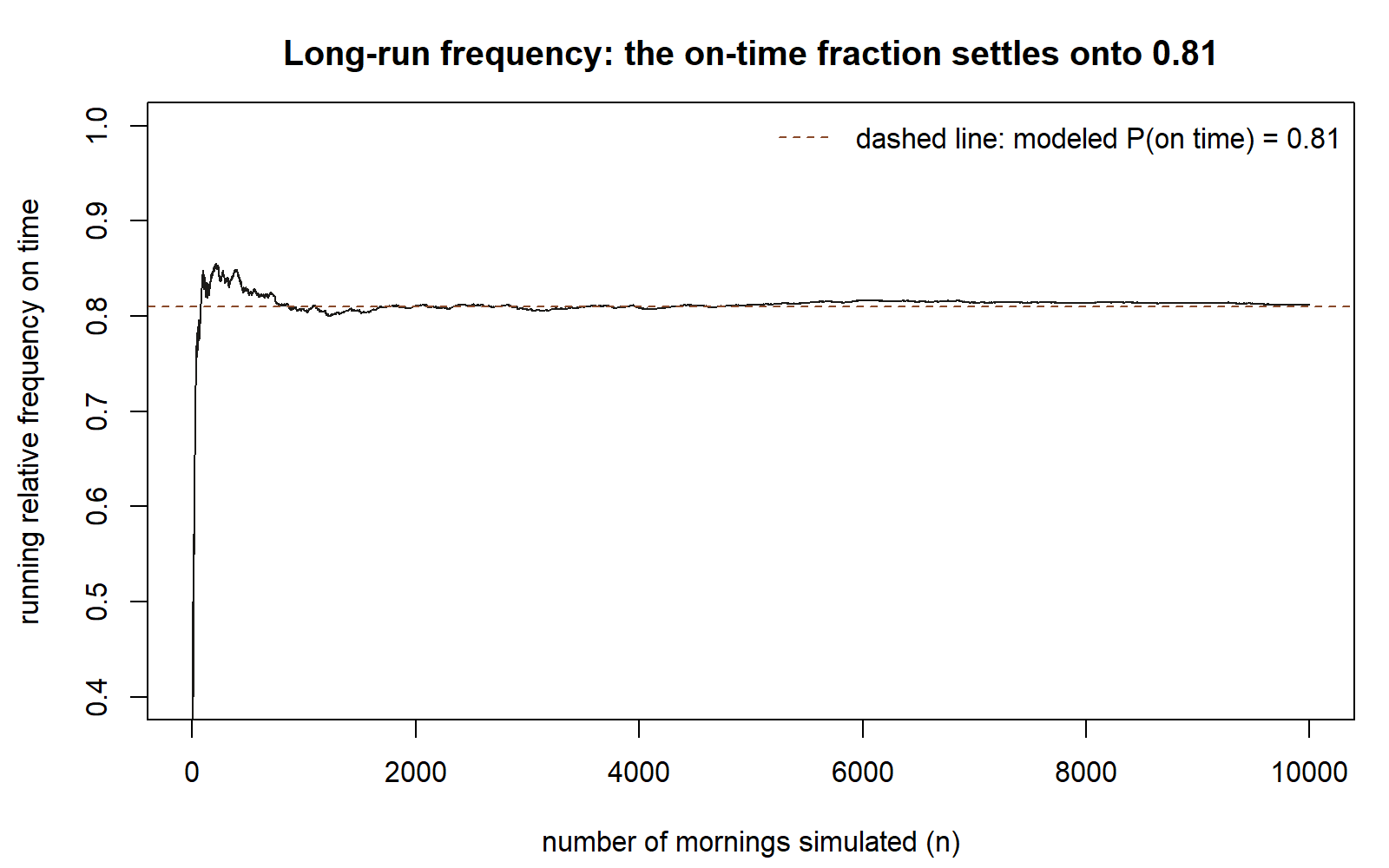
Simulation: the long-run picture, made literal
The frequency reading invites an obvious experiment: repeat the morning many times and watch the fraction on time settle down. In the real world we cannot replay a morning, but inside a model we can — that is what simulation is. We tell the computer the model’s numbers, ask it to “live” thousands of synthetic mornings, and tally how often the shuttle was on time. The tallied fraction should hover near the model’s 0.81, and hover more tightly as the number of mornings grows. Seeing that convergence on a screen is the frequency interpretation made literal.
We will not run code this week — the first simulation lab pairs with Week 2 — but it helps to see the shape of the idea now. The chunk below is shown as teaching, not executed; the #| eval: false marker means the page does not run it. If you paste it into your own R session later, the set.seed(35003) line makes your numbers match a classmate’s exactly.
Read it as a story, not as syntax to memorize: each simulated morning is an “on time / late” flip weighted 81-to-19; the running fraction is the tally-so-far; and the early snapshots are jumpy while the late ones sit close to 0.81. That settling-down is not magic — it is the long-run-frequency reading happening in front of you, and it previews the law of large numbers we make precise in Week 13.
Worked examples
Worked example — reading the shuttle headline (the recurring slice)
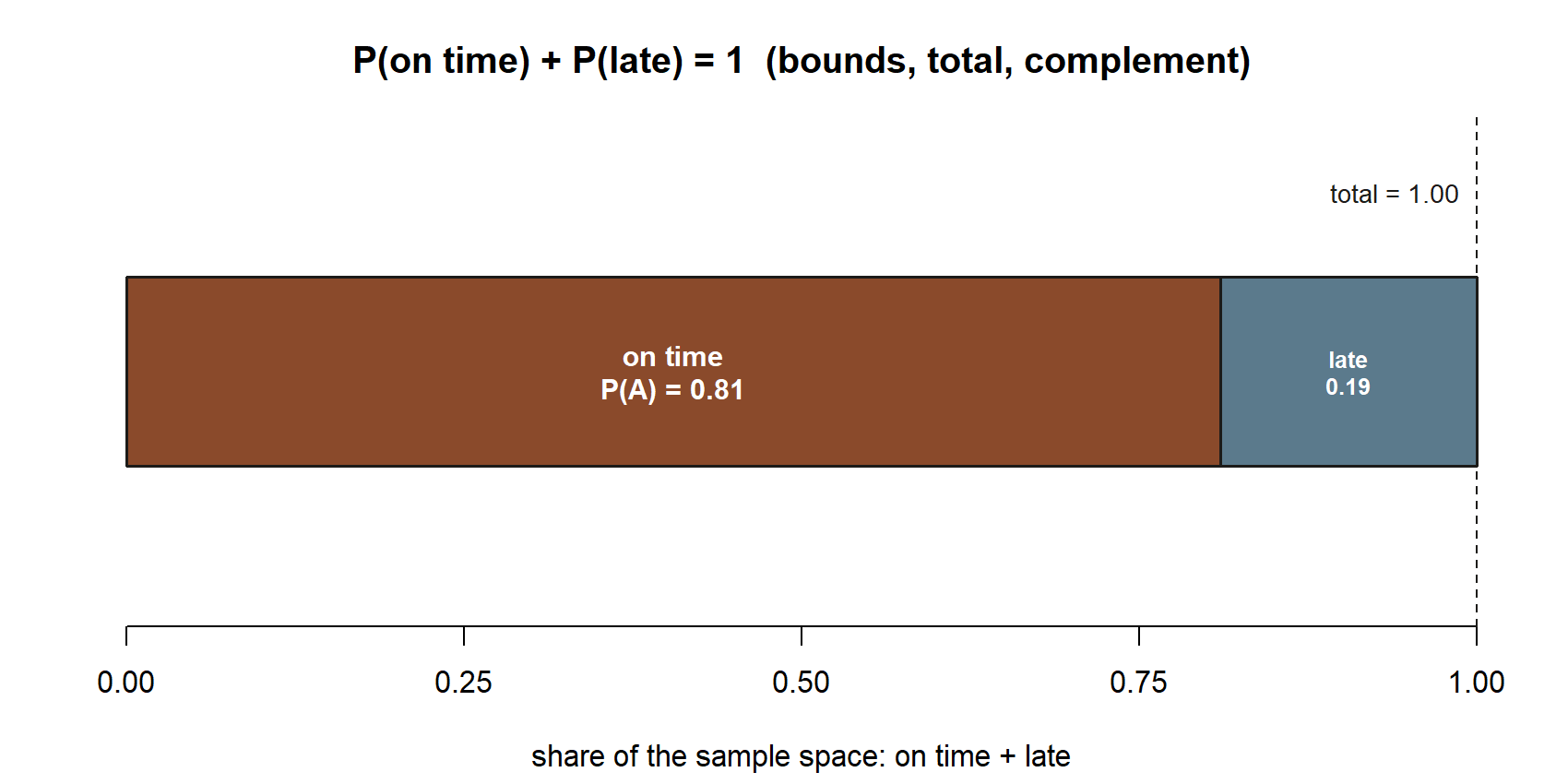
Symbolic first. Let \(A\) be the event “the shuttle is on time.” A probability model for Maya’s simplest morning is the sample space \(\Omega = \{\text{on time}, \text{late}\}\) together with an assignment \(P(A)\) and \(P(A^{c})\). The rules force a relationship between them: since “on time” and “late” are disjoint and exhaust \(\Omega\), \[ P(A) + P(A^{c}) = P(\Omega) = 1, \qquad \text{so} \qquad P(A^{c}) = 1 - P(A). \]
Now numeric. The headline gives \(P(A) = 0.81\). The complement rule immediately yields \[ P(\text{late}) = P(A^{c}) = 1 - 0.81 = 0.19. \] Check the rules: both numbers lie in \([0,1]\), and \(0.81 + 0.19 = 1.00\), so the assignment over the whole space is consistent. (Data are synthetic; seed set.)
Now read the 0.81 both ways. Frequency: over a long run of similar mornings, expect on-time arrivals about 81% of the time and late ones about 19%. Degree of belief: given what we know this morning, we are 81% confident in an on-time arrival. Notice what the simple model does not yet tell us: it says nothing about why — it hides the rain. The fuller model behind the number assumes rain on about 30% of mornings, with the shuttle on time 60% of the time when it rains and 90% when it does not, which combine to \[ P(\text{on time}) = 0.60\,(0.30) + 0.90\,(0.70) = 0.18 + 0.63 = 0.81. \] We are not assembling that here — that careful combination is the work of weeks 2–3 — but it shows concretely that 0.81 is a conclusion riding on assumptions, exactly as the model framing promised.
Worked example — a “70% chance of rain” forecast (transfer)
Symbolic first. Let \(R\) be the event named by a forecast, with \(P(R) = 0.70\). The same machinery applies: \(R\) and \(R^{c}\) are disjoint and fill the sample space, so \[ P(\text{no rain}) = P(R^{c}) = 1 - P(R). \]
Now numeric. With \(P(R) = 0.70\) we get \(P(R^{c}) = 1 - 0.70 = 0.30\), and \(0.70 + 0.30 = 1\) checks out. So far this is identical to the shuttle case — the same model machinery, a different label on the event.
The transfer lesson is in the hidden choices the tidy number conceals. “70% chance of rain” only means something once you fix three things that the headline leaves unstated:
- Which event counts as “rain”? Any measurable precipitation, or at least a set amount? A trace at dawn and a 70%-confident forecast are not the same claim.
- Which region? Rain somewhere in the county is a different event from rain at the bus stop.
- Which time window? “Today,” “this afternoon,” or “the next hour” name different events with different probabilities.
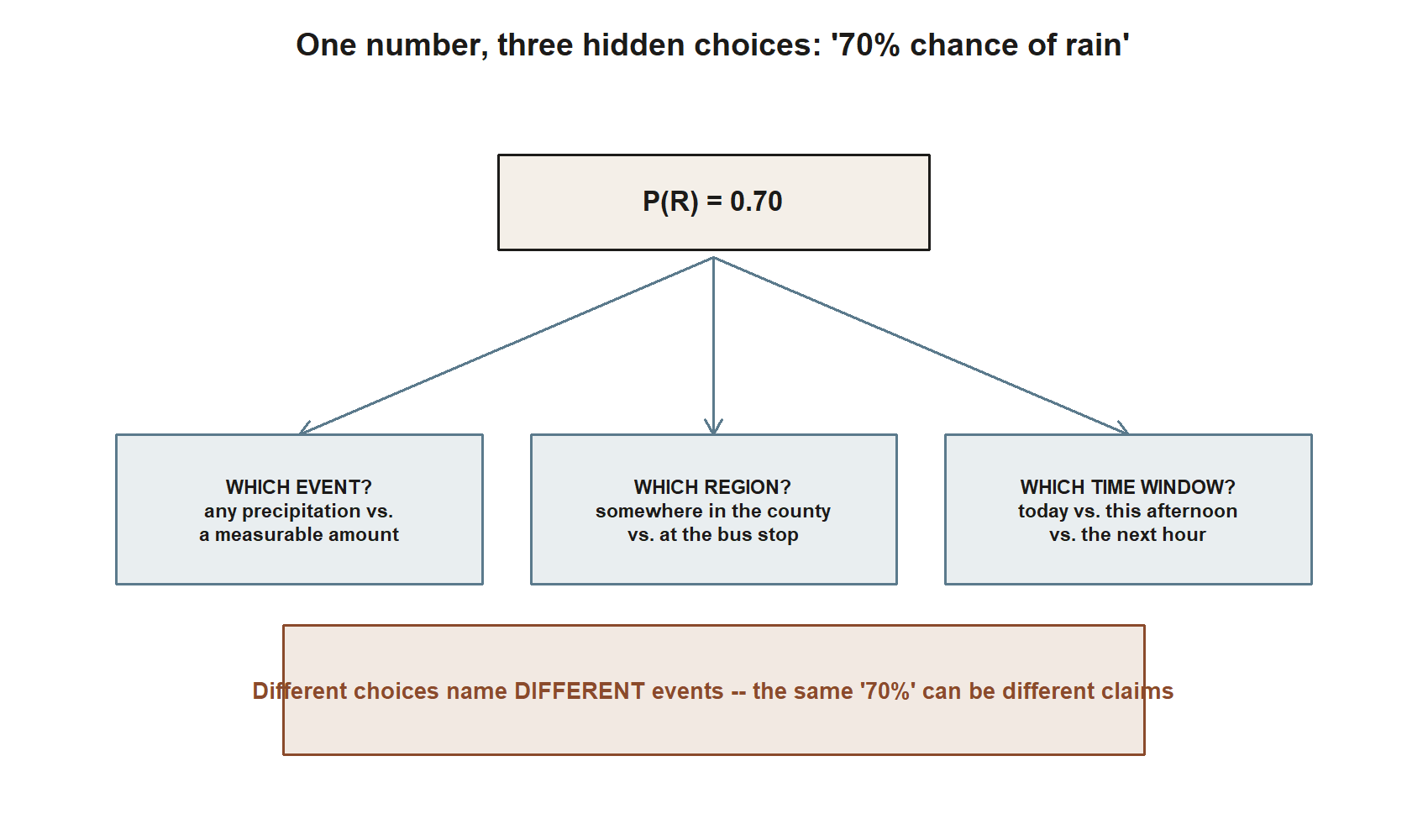
Two forecasters quoting “70%” can therefore be making genuinely different claims, just as our two readings of 0.81 answered different questions. The discipline is the same one this whole week is about: before you trust a probability, recover the model — what event, over what space, under what assumptions? (Forecast figures here are illustrative and synthetic; seed set.)
A common mistake
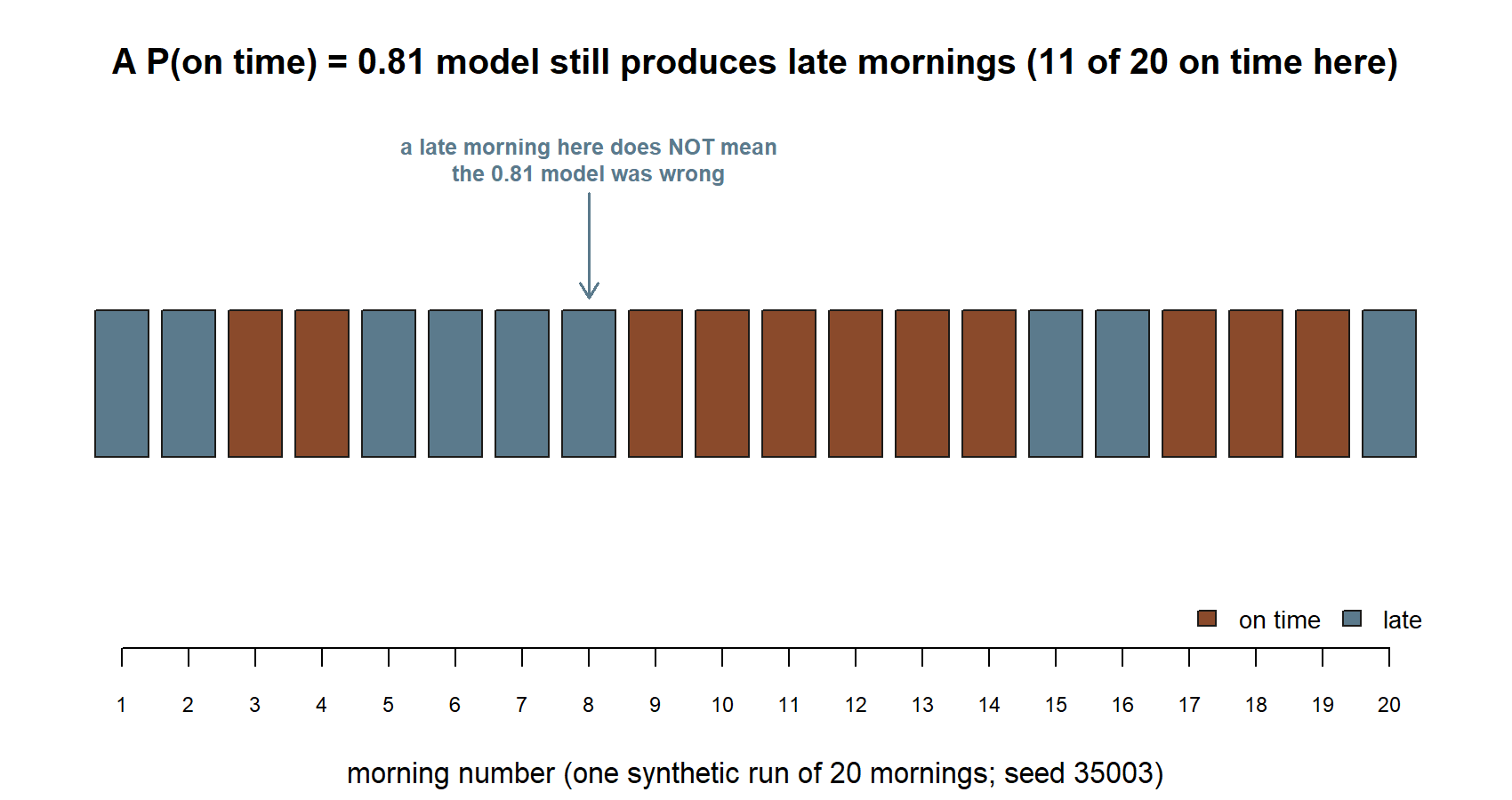
The most common Week 1 slip is treating a probability as a prediction about the single next instance, and then judging the model by that one instance. “The app said 81% and the shuttle was late — so it was wrong.” Not so. A probability of 0.81 is entirely compatible with a late morning; in fact, late mornings should happen about 19% of the time, and a model that never allowed them would be the broken one. A single outcome can rarely confirm or refute a probability. What you check instead is the long run (does on-time happen about 81% of the time over many mornings?) or the coherence (do the numbers obey the rules and rest on defensible assumptions?).
A close cousin of this mistake is forgetting that 0 and 1 are special: \(P(A)=0\) should mean genuinely ruled out and \(P(A)=1\) genuinely certain. Reserve them for events you truly mean to call impossible or sure. Sprinkling 0s and 1s onto merely-unlikely or merely-likely events quietly hard-codes assumptions you would not defend out loud.
Low-stakes self-checks (ungraded)
Use these to test your reading of this week. They are practice only — nothing here is collected or scored.
- A model gives \(P(\text{on time}) = 0.81\). Without any new computation, what is \(P(\text{late})\), and which rule did you use?
- Put the 0.81 into words twice — once as a long-run frequency and once as a degree of belief. What question does each version answer?
- Someone claims an event has probability \(1.2\). Which informal axiom does that violate, and how can you tell without knowing what the event is?
- Name the three parts of a probability model for “rain at the bus stop tomorrow,” and identify one assumption you would want to see stated.
- In the shown simulation sketch, why would you expect the running fraction at \(n = 10000\) to sit closer to 0.81 than the running fraction at \(n = 10\)?
- For “70% chance of rain,” write down one event-definition choice, one region choice, and one time-window choice that would change what the 70% means.
Reading and source pointer
This week pairs with both course texts:
- Grinstead & Snell, Introduction to Probability, Chapter 1 — Discrete Probability Distributions. Read it for the idea of attaching probabilities to outcomes and for the basic rules those probabilities obey. Free online: https://www.dartmouth.edu/~chance/teaching_aids/books_articles/probability_book/book.html.
- MIT OpenCourseWare 18.05, Introduction to Probability and Statistics — the introductory material on probability models and the interpretation of probability. Use it for a second, complementary take on what a probability means and on the modeling stance. Free online: https://ocw.mit.edu/courses/18-05-introduction-to-probability-and-statistics-spring-2022/.
- The “probability as extended logic” framing is associated with E. T. Jaynes, Probability Theory: The Logic of Science; it is cited here for orientation only and is not required reading.
These notes are the course’s own synthesis, grounded in but not copied from the sources.
Public vs. graded
These notes, the examples, and the practice here are public and ungraded — study material only. No graded prompts, answer keys, rubrics, point values, or due dates appear on this site. Graded checkpoints, quizzes, homework, labs, the midterm, the project, and the final live in Blackboard (the LMS), which is authoritative for due dates, submissions, and grades. If this page and Blackboard ever disagree, follow Blackboard.
Looking ahead
Next week we build the sample space honestly. Maya’s morning grows from the two-outcome menu into a shuttle × rain sample space, and we put the complement and addition rules to work on real events — the first step in assembling the 0.81 instead of taking it as a given. That assembly continues into Week 3, where the rainy-morning and dry-morning shuttle rates (\(0.60\) and \(0.90\)) become our first taste of conditional probability. The first hands-on simulation lab also arrives with Week 2, turning this week’s “shown but not run” sketch into something you execute yourself.
See also
- Week 2 — Sample spaces, events & rules — where the 0.81 starts to get assembled, and the rules above are applied to real events.
- Notation glossary — the binding symbols (\(\Omega\), \(A^{c}\), \(P(A)\), and the rest) used across the course.
- Distribution reference — the parameter conventions we will adopt once named distributions enter the picture.
- Course syllabus — schedule, policies, and how the public site relates to Blackboard.